Unravelling the mind of cyclists: Exploring the potential of fNIRS in capturing subjective cycling experiences
Student: Pookhao Chinpongsuwan, BSc ATLAS
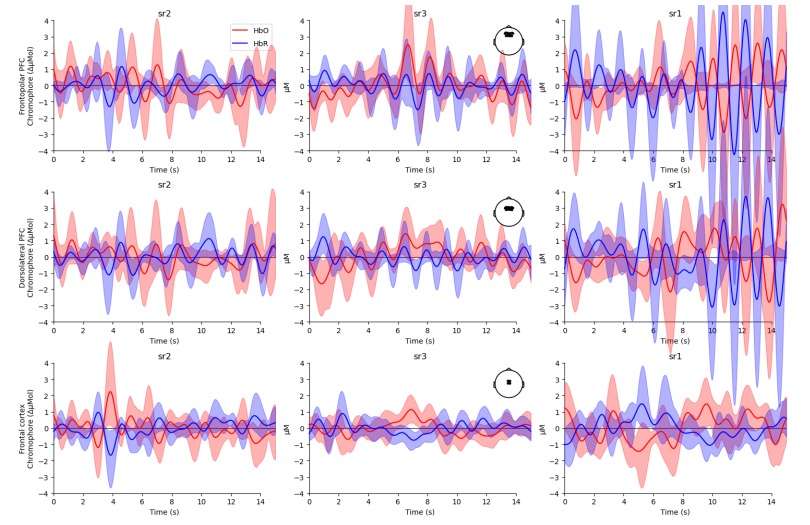
The present study investigated the potential of functional near-infrared spectroscopy (fNIRS) to capture subjective experiences during cycling and its implications for enhancing cycling participation. Using a naturalistic experiment design and self-reports, the study examined the ability of fNIRS to differentiate between positive and negative valence during cycling. Analysis of the collected data revealed higher brain oxygenation variability for negative ratings compared to neutral and positive ratings, with visually distinct oxygenation patterns observed in specific brain regions. While quantitative analysis did not yield significant results, a convolutional neural network (CNN) model achieved a slightly better-than-chance accuracy in classifying the signals. Methodological limitations, including the ambiguity of the valence concepts and immature data preprocessing tools, affected the reliability of the results. The study demonstrated the feasibility of using fNIRS for data collection on cycling experiences and emphasised the need to refine data preprocessing and analysis methods. Addressing these limitations can contribute to a deeper understanding of subjective cycling experiences, and consequently improving urban design, promoting sustainable mobility, and benefiting related fields. The study provides a foundation for future research to develop more robust frameworks for studying subjective cycling experiences in naturalistic settings and advancing knowledge in relevant domains.

Proxies and Balancing for Shared Flow in Older Adult Cyclists
Student: Laura Kahnt, MSc Interaction Technology, University of Twente
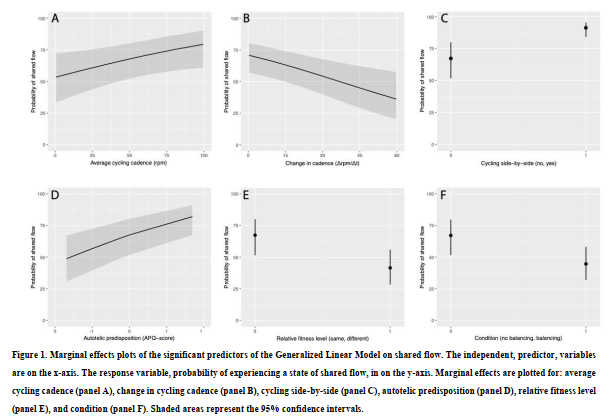
Cycling, a healthy and eco-friendly activity enjoyed by people of all ages and fitness levels, can be further encouraged by improving the cycling experience. The mental state of flow, characterized by complete absorption and engagement in an activity that matches one’s skill level, is considered as the optimal experience in physical activity. While flow has mainly been studied in individual settings, it can also be experienced in groups and has been shown to be more enjoyable. However, differences in fitness levels among cyclists can make it difficult to experience shared flow. The motor of electric bicycles can help address these differences by providing more support to less-fit cyclists (positive balancing) or reducing support for fitter cyclists (negative balancing). The aim of this study was to identify directly measurable proxies for shared flow and examine the impact of positive and negative balancing on shared flow. To accomplish this, an experiment was conducted with pairs of older adult recreational cyclists, a group that the Dutch government actively encourages to cycle more. The collected data was analyzed using mixed-effects regression models. The results indicate that the relative position and cadence of cyclists could serve as directly measurable proxies for shared flow, while heart rate may not be as suitable. However, these findings may not be generalizable to other populations or contexts due to the limitations of this study. Furthermore, this study did not find a significant relationship between balancing and shared flow, though further analysis revealed some leads indicating negative balancing could be more suitable to induce shared flow than positive balancing. However, additional research is necessary before firm conclusions can be drawn on the effect of balancing on shared flow. To advance the field of study, future research should improve data collection and analysis methods, test with diverse populations, and incorporate additional physiological and neurological measures.
Automatic labeling of road quality using machine learning
Student: Steven Tazelaar, BSc Technical Computer Science, University of Twente
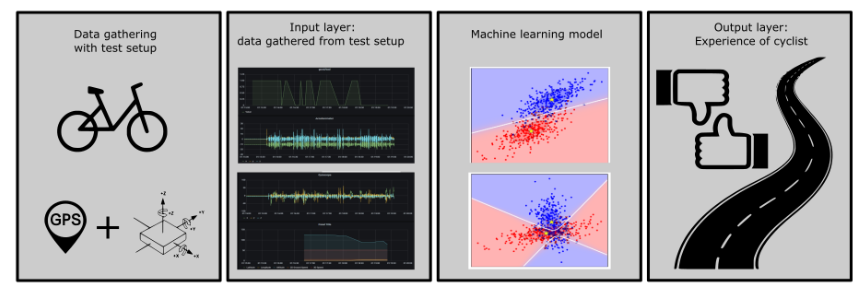
The goal of this research is to create a software that uses machine learning to accurately label road quality when cycling to get an overview of the roads that are in need of improvement or are being experienced as a good road. A data collection setup was made, using IMU and GPS sensors connected to a Raspberry Pi with a connection to bucket. The user labels roads as good or bad using two buttons on the bike handlebars. Two machine learning algorithms are applied to the data: LDA and QDA. A validation was performed on a road of which the model did not get a label as input. LDA ad QDA lead to an accuracy of 0.83 and 0.82 respectively. A specificity of 0.66 and 0.72 was reached respectively and both had a sensitivity of 0.92. During the validation, all three types of roads that were measured got a classification that matched their label, validating the model. Further research could improve the model, for instance use of more sensors, more data to feed to the model, application of other machine learning models and other methods of labeling data. The LDA and QDA machine learning algorithms both have the potential to automatically label road quality in cycling.
Early Warning System for Safe Lateral Maneuver of Bicycles
Student: Kaushik Kalaiselvan, Pervasive Systems Group, Faculty of Electrical Engineering, Mathematics & Computer Science
Sustainable and smart mobility strategies are now starting to be adopted to reduce the CO2 emission as well as take advantage of digitalization and automation to achieve seamless, safe, and efficient transportation. Bicycles and e-bikes are considered to be the leaders of this transition, as they are cost-effective and have a positive impact on health. With the growing popularity and usage of bicycles, cycling safety becomes more critical. The lateral maneuver of bicycles is a typically apprehended maneuver on the roads and improper assessment of the surroundings during this typically causes various accidents. Although this action is highly similar to the lane change maneuver performed in cars, the assistance systems developed for cars will not be effective for bicycles, due to the characteristics traits of bicycles such as limited size/space, low cost, low weight, vehicle dynamics, and their road infrastructure. This brings many challenges to the system design. The solutions for bicycles are required to be cost-effective, less complex in terms of hardware and software design, efficiently provide maximum utility with minimal resources, and provide a relatively good accuracy across different environments at the same time. In this work, we design and demonstrate a novel multi-modal early warning system to assist cyclists in identifying dangerous situations during lateral maneuvers. To the best of our knowledge, this is the first work that addresses the constraints, designs a complete system for lateral maneuver of bicycles, and validates it using extensive experiments in real-road scenarios. It consists of a 76GHz millimeter wave (mmWave) radar sensor and two ultrasonic sensors to detect targets such as cars, trucks, bicycles, and pedestrians in the rear-side blind-spot regions as well as approaching from behind; and using the combination of Time-to-Collision (TTC) and Minimum-Safe-Distance (MSD) metrics to assess and generate warnings about potential danger at an early stage. The warnings generated by the system include two distinct information and provide improved utility towards the safety of bicycles. The warnings indicate the side of potential maneuvering hazard to host cyclist and of a dangerously approaching vehicle right behind the host bicycle. This additional information can be used to alert the cyclist of the approaching bicycle to be aware of the host bicycle to mitigate a collision. From the extensive experiments in real-road scenarios, the method is deemed feasible and can identify threats and warn the rider about 5 seconds in advance with an accuracy of 95.2%.
A Low-Budget, End-To-End Warning System for Bicycles using Monocular Vision and Vibrating Handlebars
Student: Marrit Schellekens, Pervasive Systems Group, Faculty of Electrical Engineering, Mathematics & Computer Science
Awareness of surrounding traffic is crucial for safety. Nowadays warning and information technology in cars is often used to supplement people’s awareness of their surroundings. This thesis presents such a warning system, but designed for bicycles instead. An end-to-end, low budget system was developed, that warns cyclists of upcoming traffic. The only sensor input to the system is a monocular camera, and the processing is done on a cheap 100$ computer. For processing the choice was made to use the Yolov4 neural network, in combination with custom algorithms for tracking and finding the direction of travel. Additionally, a survey was performed to explore people’s acceptance of such a system, and find the necessary performance such a system must have. The survey indicated such a system must have warning times of at least 3-4 seconds, which in practice was only reached less in less than 50% of cases. Additionally parked cars often created false warnings. The main obstacle in having a faster warning time or less false positives was the performance of the tracking algorithm.
Forward Collision Warning System with visual distraction detection in bikes
Student: Visshnu Govindaraj, Pervasive Systems Group, Faculty of Electrical Engineering, Mathematics & Computer Science
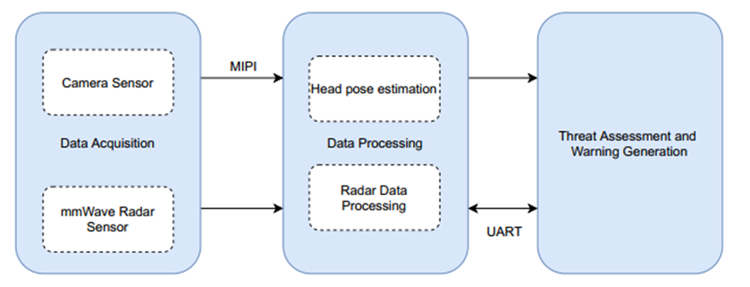
The recent development in urbanization has led to a persistent increase in road traffic volume and traffic accidents. Bicycles and Electric Bikes (e-bikes) are highly recommended due to the pollution generated by high-end automobiles, and they are also cost-effective, environmentally friendly, and have health advantages. The increase in traffic volume and accidents has fueled the research on Forward Collision Warning (FCW) systems in automobiles for proper safety of the driver. Forward collision occurs more frequently which leads to fatality on both sides. However, adapting the FCW systems in high-end
automobiles to bicycles has limitations due to complexity, cost, and size. In this master thesis, a multi-sensor integrated forward collision warning(FCW) system with visual distraction detection is developed. The system uses Millimeter Wave (mmWave) radar module for detecting the vehicle in the front and a camera module to estimate the head pose of the rider. The Time-To-Collision (TTC) and Minimum Safe Distance (MSD) metrics are then used to assess the threat and alert the rider. The Threshold of the TTC is varied based on the alertness of the rider. This method shows good performance with an accuracy of 96.7% in shared road scenarios.